Maradva a mezőgazdaság vonalán, természetes, hogy az erőgépek robotpilóta rendszere is ilyen. Annál is inkább, hiszen a technológia alapjául szolgáló GPS-es helymeghatározó rendszerek is a 90-es években kezdtek működni, de igazán - szabadon - használhatóvá csak a szándékos zavaró jelsugárzás (ún. S/A kód) 2000-ben történt megszüntetése után vált.
És mégis! Volt élet, a GPS előtt is. Szovjet szakemberek már az 50-es évek közepén-végén megvalósították a traktorok automatikus kormányzását. Az egyik megoldás egy a tábla közepére kihelyezett központi egységből állt, melyhez egy kábellel kapcsolódott az erőgép, mely a központi egységet egyre kisebb sugarú körben körül járva művelte a területet. Emberi munkára az áttelepítésekkor, illetve a sarkokon kihagyott területek megműveléséhez volt szükség.
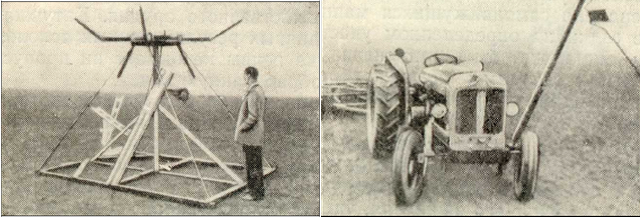
Képesek voltak persze gépek egyenes - vagy tetszőleges - vonal mentén történő automatikus kormányzására is - méghozzá az elektromágneses indukció elvét kihasználva. Az erőgép elejére rögzített érzékelő két oldalára egy-egy elektromágnest helyeztek és mérték a bennük indukálódott feszültséget. Amelyik oldalon ez kisebb volt, az messzebb volt a követendő vonaltól, tehát az ellenkező irányba kellett kormányozni a gépet.
Az elv egyszerű, a működés biztos. Sőt, ez a megoldás nagyobb visszatérési pontosságot biztosított, mint a mai pl. EGNOS korrekciót használó műholdas rendszerek. Ugyanakkor szükség volt valamire, ami feszültséget indukál az elektromágnesekben és ezáltal meghatározta a haladási irányt. Ez pedig nem volt más, mint a talajban elhelyezett vezeték. A működés - a művelés iránya és a munkaszélesség - tehát kötött volt, a vezetékek lefektetése komoly munkát és költséget jelentett.
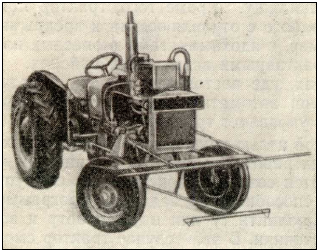
Készült olyan kormányautomatika is, amikor több traktor egymással kábeles (elektromos) összeköttetésben dolgozott. Gépkezelő csak az első gépen volt, az ő kormánymozdulatait vitték át a vezetékeken a további gépekre.
Ma, a mAXI-NET hálózat révén az ország lényegében bármely pontján képesek vagyunk 2,5 cm pontos műholdas helymeghatározásra, egyidejűleg felhasználva az amerikai (GPS) és orosz (GLONASS) műholdak jeleit. Az erőgép kormánytengelyén, vagy közvetlenül a kormányhidraulikába beavatkozó robotpilóta rendszerek a másodperc tört része alapján számítják ki és hajtják végre a kívánt kormánymozdulatot az aktuális pozíció, a haladási irány és sebesség, a kormányzott kerék állása, ill. a gép dőlésének függvényében és figyelembe véve az erőgép és a hozzákapcsolt munkagép kialakítását (pl. függesztett vagy vontatott) és méreteit. Ezzel egymenetben képesek a permetezőgépek, ill. szemenként vetőgépek automatikus szakaszvezérlésére ill. sorelzárására, a szórókeret automatikus magasság vezérlésére, egyidejűleg akár több szilárd, vagy folyékony műtrágya terv alapú, dózisszabályozott kijuttatására, vagy hozammérésre, stb. Mára nem kérdés az erőgép, ill. a munkagép gyártmánya sem, a Topcon GPS eszközei széleskörű kompatibilitást biztosítanak.


De mielőtt szánakozva mosolyognánk az akkori kor és éra technikai megoldásain, meg kell említeni, hogy azok az '50-es években születtek. A témát már akkor jelentős érdeklődés követhette, hiszen a szovjet szerzők, F.M. Rusilov és L.G. Popov 1959-ben összefoglaló művet adott ki róla "Traktorok és önjáró mezőgazdasági gépek automatizálása" címmel (MASGIZ kiadó, Moszkva). A fenti információk és képek, ebből a munkából származnak. A szerzők írnak előre programozott útvonal lekövetésére alkalmas megoldásról, de látható- és infravörös fényre alapozott járműnavigációról is. Utóbbi megoldás 1944-re datálódik!
Bármennyire is kezdetlegesnek, néha megmosolyogtatónak tűnhetnek ezek a megoldások, az adott kor technikai színvonalán ezek a csúcstechnikát jelentették. Épp úgy, mint ma a fent említett GPS-es vezérlések. És talán nem túlzás azt mondani, hogy ebben az esetben, a 21. század embere igazából nem újat talált ki, hanem egy régi ötletet valósított meg, a ma elérhető technológiákat felhasználva.
Szerző: Mesterházi Péter Ákos, az AXIÁL Kft. precíziós gazdálkodási csoportvezetője, aki 2016. február 24-én élőben tart előadást a PREGA konferencián.
A szerző köszönetet mond Dr. Kocsis Sándornak, a felhasznált orosznyelvű irodalom figyelembe ajánlásáért és fordításáért.
(x)













